Tenzor elastičnosti
Iz Fizika trdne snovi 2007 - 2008
| Redakcija: 08:48, 13 marec 2008 (spremeni) Urbancici (Pogovor | prispevki) ← Pojdi na prejšnje urejanje |
Trenutna redakcija (14:45, 31 marec 2008) (spremeni) (undo) 193.2.86.3 (Pogovor) |
||
| ( not shown.) | |||
| Vrstica 6: | Vrstica 6: | ||
| === Deformacija === | === Deformacija === | ||
| + | |||
| + | [[Slika:EK1.png|right|Slika 1: premik posamezne točke '''u'''('''r''').]] | ||
| Deformacijo zveznega telesa v vsaki točki '''r''' opišemo z odmikom od prvotne lege '''u'''('''r'''): | Deformacijo zveznega telesa v vsaki točki '''r''' opišemo z odmikom od prvotne lege '''u'''('''r'''): | ||
| Vrstica 12: | Vrstica 14: | ||
| \mathbf{R}(\mathbf{r})=\mathbf{r}+\mathbf{u}(\mathbf{r}) . | \mathbf{R}(\mathbf{r})=\mathbf{r}+\mathbf{u}(\mathbf{r}) . | ||
| </math> | </math> | ||
| - | |||
| - | [[Slika:EK1.png | right | Slika 1: premik posamezne točke '''u'''('''r''').]] | ||
| Ker lahko tako opisani odmiki vključujejo tudi togi premik celotnega telesa, ki nas ne zanima, je v primeru majhnih deformacij smiselno definirati tenzor, ki opisuje spreminjanje komponent deformacije v vsaki kartezični smeri ''x'', ''y'' in ''z'' kot | Ker lahko tako opisani odmiki vključujejo tudi togi premik celotnega telesa, ki nas ne zanima, je v primeru majhnih deformacij smiselno definirati tenzor, ki opisuje spreminjanje komponent deformacije v vsaki kartezični smeri ''x'', ''y'' in ''z'' kot | ||
| Vrstica 22: | Vrstica 22: | ||
| === Napetostni tenzor === | === Napetostni tenzor === | ||
| + | |||
| + | [[Slika:EK2.png|right|Slika 2: Ponazoritev napetosti v telesu.]] | ||
| Pri deformaciji pride v snovi do notranjih napetosti, ki jih opisuje '''napetostni tenzor''' ''p<sub>ij</sub>'': | Pri deformaciji pride v snovi do notranjih napetosti, ki jih opisuje '''napetostni tenzor''' ''p<sub>ij</sub>'': | ||
| Vrstica 46: | Vrstica 48: | ||
| Od prvotnih 9 komponent je tako neodvisnih le še 6. | Od prvotnih 9 komponent je tako neodvisnih le še 6. | ||
| - | |||
| - | [[Slika:EK2.png | right | Slika 2: Ponazoritev napetosti v telesu.]] | ||
| === Deformacijski tenzor === | === Deformacijski tenzor === | ||
| Vrstica 118: | Vrstica 118: | ||
| === Kubična simetrija === | === Kubična simetrija === | ||
| + | |||
| + | [[Slika:EK3.png|right|Slika 3: Primer rotacije kristala okoli simetrijske osi (111).]] | ||
| Pri nadaljnji redukciji števila konstant bomo uporabili simetrije tro- in štirištevnih osi, ki potekajo po telesnih diagonalah oz. vzdolž stranic kocke. | Pri nadaljnji redukciji števila konstant bomo uporabili simetrije tro- in štirištevnih osi, ki potekajo po telesnih diagonalah oz. vzdolž stranic kocke. | ||
| Vrstica 130: | Vrstica 132: | ||
| \end{matrix} | \end{matrix} | ||
| </math> | </math> | ||
| - | |||
| - | [[Slika:EK3.png | right | Slika 3: Primer rotacije kristala okoli simetrijske osi (111).]] | ||
| Zgled: pri drugi rotaciji se komponente deformacijskega tenzorja ''u<sub>ij</sub>'' transformirajo v ''u<sub>i'j'</sub>'' kot | Zgled: pri drugi rotaciji se komponente deformacijskega tenzorja ''u<sub>ij</sub>'' transformirajo v ''u<sub>i'j'</sub>'' kot | ||
| Vrstica 185: | Vrstica 185: | ||
| </math> | </math> | ||
| - | nastopati le členi, ki pri nobeni od zgornjih rotacij ne spremenijo predznaka. To lastnost imajo vsi kvadrati elementov ''u<sub>i</sub><sup>2</sup>'' ter produkti med dvema od prvih treh komponent ''u<sub>i</sub>u<sub>j</sub>'' (za ''i'', ''j'' = 1, 2, 3, npr. ''u<sub>1</sub>u<sub>2</sub> = u<sub>xx</sub>u<sub>yy</sub>''). Za vse ostale člene lahko najdemo tako rotacijo, ki bo spremenila njihov predznak, zato fizikalno niso sprejemljivi in jim pripišemo koeficiente ''C<sub>ij</sub>'' = 0: | + | nastopati le členi, ki pri nobeni od zgornjih rotacij ne spremenijo predznaka. To lastnost imajo vsi kvadrati elementov ''u<sub>i</sub><sup>2</sup>'' ter produkti med dvema od prvih treh komponent ''u<sub>i</sub>u<sub>j</sub>'' (za ''i'', ''j'' = 1, 2, 3, npr. ''u''<sub>1</sub>''u''<sub>2</sub> = ''u<sub>xx</sub>u<sub>yy</sub>''). Za vse ostale člene lahko najdemo tako rotacijo, ki bo spremenila njihov predznak, zato fizikalno niso sprejemljivi in jim pripišemo koeficiente ''C<sub>ij</sub>'' = 0: |
| <math> | <math> | ||
| Vrstica 191: | Vrstica 191: | ||
| </math> | </math> | ||
| - | Tudi v primeru rotacije deformacije okoli štirištevnih osi za #p/2 morajo napetosti ostati enake. V primeru rotacije okoli osi ''x'' | + | Tudi v primeru rotacije deformacije okoli štirištevnih osi za <math>\pi/2</math> morajo napetosti ostati enake. V primeru rotacije okoli osi ''x'' |
| <math> | <math> | ||
| Vrstica 206: | Vrstica 206: | ||
| </math> | </math> | ||
| - | Ostale so nam torej res le '''3 neodvisne elastične konstante''' ''C<sub>11</sub>'', ''C<sub>12</sub>'' in ''C<sub>44</sub>'': | + | Ostale so nam torej res le '''3 neodvisne elastične konstante''' ''C''<sub>11</sub>, ''C''<sub>12</sub> in ''C''<sub>44</sub>: |
| <math> | <math> | ||
Trenutna redakcija
Vsebina |
[spremeni] Naloga
Pokaži, da je v splošnem primeru neodvisnih le 21 od 81 elastičnih konstant, ki povezujejo napetost in deformacijo kristala, ter da so v primeru snovi s kubično simetrijo neodvisne le še 3.
[spremeni] Rešitev
[spremeni] Deformacija

Deformacijo zveznega telesa v vsaki točki r opišemo z odmikom od prvotne lege u(r):

Ker lahko tako opisani odmiki vključujejo tudi togi premik celotnega telesa, ki nas ne zanima, je v primeru majhnih deformacij smiselno definirati tenzor, ki opisuje spreminjanje komponent deformacije v vsaki kartezični smeri x, y in z kot
[spremeni] Napetostni tenzor

Pri deformaciji pride v snovi do notranjih napetosti, ki jih opisuje napetostni tenzor pij:

Pove torej, kolikšna sila F v smeri i deluje na namišljeno notranjo ploskev S z normalo v smeri j. V primeru majhnih obremenitev so napetosti v snovi linearno sorazmerne z deformacijo (posplošeni Hookov zakon), le da sorazmernostne elastične konstante, ki povezujejo dva tenzorja drugega reda, sestavljajo tenzor četrtega reda Cijkl:

(V zgornji enačbi in v nadaljevanju zaradi lažjega in preglednejšega pisanja upoštevamo sumacijski dogovor o seštevanju po ponovljenih indeksih.) Tenzor C ijkl ima načeloma 34 = 81 elementov, a bomo v nadaljevanju pokazali, da je v najsplošnejšem primeru neodvisnih le 21 komponent.
Predstavljajmo si majhno kockico v notranjosti deformiranega telesa in poglejmo, kakšne sile delujejo na njene mejne ploskve. Očitno je, da sta nasprotni ploskvi obremenjeni z nasprotnima silama: s kakršno silo deluje okolica na zgornjo ploskvico, s tolikšno deluje tudi spodnja na snov pod njo, slednja pa z nasprotno enako silo nazaj na vmesno – taki pari sil se torej uravnovesijo. Podobno mora veljati za navore, da se košček ne začne vrteti sam od sebe, kar dosežemo z zahtevo o simetričnosti napetostnega tenzorja

Od prvotnih 9 komponent je tako neodvisnih le še 6.
[spremeni] Deformacijski tenzor
Zgoraj definirani tenzor vij lahko razstavimo na simetrični in antisimetrični del:

Iz elastomehanike se spomnimo, da drugi člen wij predstavlja togo rotacijo, tako da splošno deformacijo povsem popiše simetrični deformacijski tenzor uij. Tako kot napetostni tenzor pij ima tudi deformacijski tenzor uij le 6 prostih elementov. Zvezo med tenzorjema lahko z nekoliko spremenjenimi oznakami

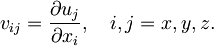
lahko prepišemo v bolj pregledno obliko:

oz. eksplicitno razpisano
Preostalo nam je 36 elastičnih konstant Cij, ki pa tudi niso vse neodvisne.
[spremeni] Energija deformacije
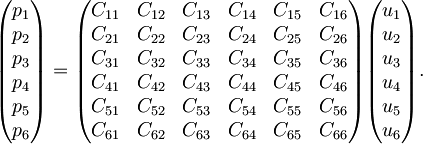
Elastična energija deformacije vzmeti je v eni dimenziji odvisna od kvadrata raztezka. Tudi za trorazsežno telo je gostota proste energije f kvadratna funkcija deformacij, le da lahko v splošnem nastopajo tudi mešani členi:
Koeficienti C'ij so povezani z zgornjimi Cij, kar bomo videli čez nekaj trenutkov.
Komponente deformacijskega tenzorja lahko enakovredno definiramo tudi kot odvode proste energije po ustreznem elementu deformacijskega tenzorja

(v tem primeru sumacijski dogovor ne velja, vsota je izpisana eksplicitno). Če rezultat primerjamo s prejšnjo definicijo (zadnji korak zgornje formule), dobimo povezavo med koeficienti Cij in C'ij

od koder sledi, da ima simetričen tenzor Cij le 21 neodvisnih elementov (6 na diagonali in 15 nad njo), ki predstavljajo 21 elastičnih konstant triklinskih kristalov z najnižjo stopnjo simetrije. Vse dodatne simetrijske zahteve njihovo število še nadalje skrčijo; kot bomo videli v nadaljevanju, ostanejo kristalom s simetrijo kocke le še 3 proste elastične konstante.
[spremeni] Kubična simetrija

Pri nadaljnji redukciji števila konstant bomo uporabili simetrije tro- in štirištevnih osi, ki potekajo po telesnih diagonalah oz. vzdolž stranic kocke. Če zavrtimo smer deformacije za 90° oz. 120° okoli ustrezne simetrijske osi, kristal ne čuti razlike, transformirajo se le koordinate deformacije. V primeru troštevnih osi se to zgodi po sledečih shemah:
Zgled: pri drugi rotaciji se komponente deformacijskega tenzorja uij transformirajo v ui'j' kot

Iz definicije uij vidimo, da velja

saj deformacija ali odvod v nasprotni smeri oba spremenita predznak elementa. Ker pa se pri takih rotacijah deformacije gostota energije f ne sme spremeniti, smejo v izrazu

nastopati le členi, ki pri nobeni od zgornjih rotacij ne spremenijo predznaka. To lastnost imajo vsi kvadrati elementov ui2 ter produkti med dvema od prvih treh komponent uiuj (za i, j = 1, 2, 3, npr. u1u2 = uxxuyy). Za vse ostale člene lahko najdemo tako rotacijo, ki bo spremenila njihov predznak, zato fizikalno niso sprejemljivi in jim pripišemo koeficiente Cij = 0:

Tudi v primeru rotacije deformacije okoli štirištevnih osi za π / 2 morajo napetosti ostati enake. V primeru rotacije okoli osi x

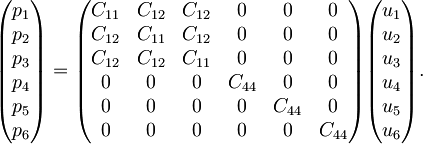
morata biti zadnja dva prispevka prečnih deformacij enakovredna. Z rotacijami okoli ostalih osi ugotovimo, da morajo biti enaki tudi diagonalni prispevki, torej se konstante poenostavijo

Ostale so nam torej res le 3 neodvisne elastične konstante C11, C12 in C44: